Robotic Folding
Client
Studio Joris Laarman
Collaborator
RoboFold
Exhibitions
Hyperlinks: Architecture and Design
Art Institute of Chicago, Chicago, USA
Laarman Lab
Friedman Benda Gallery, New York, USA
Publications
Inside Smart Geometry
Wiley, 2013
Hyperlinks: Architecture and Design
AIC/Yale University Press, 2010
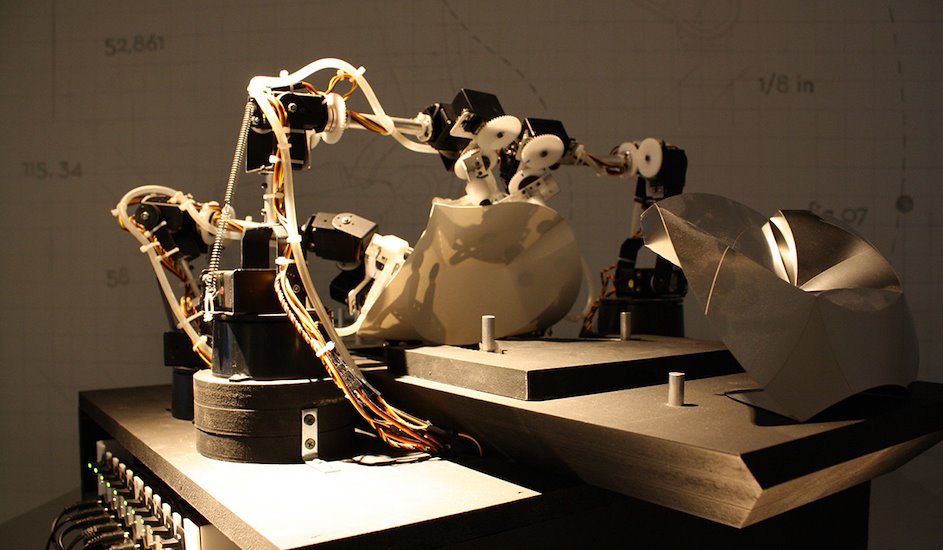
The collaboration with RoboFold was based around creating a proof of concept system for the company’s proposed robotic manufacturing system. The concept of the system is that flat sheets can be CNC scored using curved fold lines and then folded into a 3d form using a group of collaborating robot arms. To create this system off the shelf educational robot arms were outfitted with custom end effectors, hardware controllers, and software. The behaviour was created using software developed in Maya that could be used to calculated the trajectory of each of the arms in tandem with the other robots. A test of this system was commissioned by Studio Joris Laarman as a means of prototyping a chair he had designed to be folded out of a single sheet of steel.